Manipuladores
La manipulación es una habilidad avanzada que separa a los robots de otros sistemas computarizados y automatizados.
La capacidad robótica de interactuar físicamente y modificar ambientes - es decir, manipular - abre margen para varias aplicaciones.
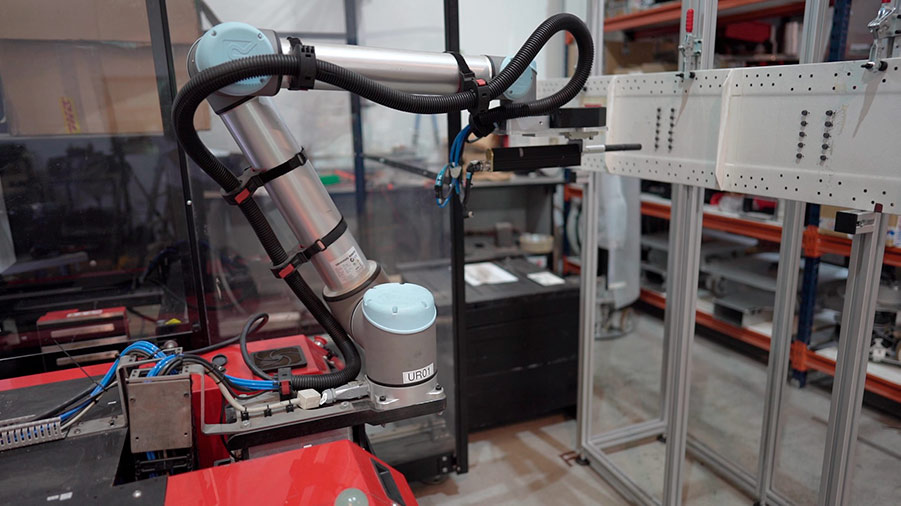
Es básicamente, un robot que integra un brazo manipulador robótico en una plataforma móvil, aunando en un único producto las ventajas que ofrecen ambos sistemas: la precisión, destreza y flexibilidad de uno, y la autonomía y movilidad del otro.
Los manipuladores robóticos existen en diferentes tamaños y formas. La mayoría, sin embargo, consiste en un brazo robótico y una herramienta en la punta (un end effector).
El ejemplo más simple de un end effector es un copo de succión (una garra de succión o garra a vacío). Al conectar ese copo a un sistema de bombeo a vacío, es posible usar la diferencia de presión para sujetar objetos y moverlo
Este modelo es normalmente usado para la paletización de objetos cerrados en cajas, y posee poco control y sensibilidad para objetos pequeños.
Existen aún otras limitaciones para este modelo de herramienta, pero es importante observar que los grados de libertad (DOF, por sus siglas en inglés degrees-of-freedom) son limitados en este caso gracias a la poca capacidad de mover el objeto en algún eje.
Una garra 1-DOF, por ejemplo, puede tomar un objeto con dedos que abren y cierran, moverlo en la misma posición a otro lugar. Al añadir un segundo DOF, como una muñeca giratoria, la garra puede reorientar el objeto antes de su colocación.


Yendo más allá de una garra 2-DOF, los manipuladores robóticos se vuelven cada vez más complejos y pueden realizar actividades elaboradas, como empujar, lanzar o manejar con cuidado piezas pequeñas.
En esto, cuanto más la garra añade elementos de manipulación que se asemejan a un brazo y mano humanos, más compleja se vuelve. Es posible llegar a los 20 o más DOFs para un robot, y con las herramientas correctas, hay maneras de garantizar más habilidades que una mano humana orgánica con sus 24-DOFs.
No toda aplicación exige un grado de maniobrabilidad tan grande. A menudo, es posible automatizar con menos movimientos, incluso para ahorrar tiempo en los ciclos y optimizar la línea productiva.
Es importante realizar una apreciación de riesgos antes de implementar cualquier solución automatizada, como exige la ISO 15066 para el uso de robots colaborativos en espacios industriales, por ejemplo.
Algunas aplicaciones
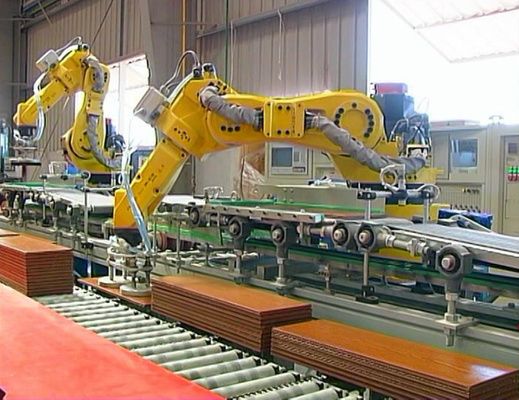
Paletizacion

Empaquetado

Manejo de piezas (pick and place)
¿Cómo es su entorno?
Un entorno de trabajo puede ser estructurado o no estructurado.
Por estructurado se entiende que el robot no encontrará muchos obstáculos inesperados a su alrededor, es decir, que no habrá modificaciones en el trazado para que el robot mantenga los puntos de referencia que le permiten ubicarse.
Si es no estructurado, únicamente con que se mantenga en torno al 20% los puntos de referencia, el robot será capaz de sortear los obstáculos dinámicos, es decir, inesperados. Cuando los detecte, reconducirá su ruta de forma inteligente asegurando la seguridad y la rentabilidad del tiempo de trabajo.
¿Qué características debe tener el edificio?
El suelo es un aspecto muy importante a tener en cuenta, ya que los suelos irregulares afectan a la precisión de la odometría y a las vibraciones generadas por la medición láser. Además, las ruedas mecánicas pueden tener algunas limitaciones en algunos entornos: suelos aceitosos o grasientos, suelos con mucha suciedad, con arenilla o asperezas.
Las paredes y las estanterías son importantes para que el robot navegue por el suelo, localizando y mapeando simultáneamente. Los manipuladores móviles de Robotnik las tomarán como referencia y, una variación no superior al 20% respecto a la disposición original, no afectará al rendimiento del robot.
¿Cuánta precisión requiere su aplicación?
Por defecto, la precisión de posición proporcionada por el LiDAR para la navegación SLAM es de unos 5 a 10 cm. Esta precisión puede ser suficiente para una aplicación normal en la que el robot simplemente transita del punto A al punto B o va a varios puntos de espera. Pero para aplicaciones específicas como Pick&Place o la interacción con otra maquinaria, esta precisión puede mejorarse hasta 1 mm.
Esto se consigue añadiendo sensores o códigos QR. Así se hace, por ejemplo, para el acoplamiento: añadimos un código que la cámara reconoce y es capaz de reubicar.
¿Cuánta carga útil necesita llevar?
Cada manipulador móvil de Robotnik tiene una capacidad de carga distinta, para que pueda encontrar la mejor opción de robot en función de la carga que requiera su caso.
En concreto, la configuración estándar de RB-KAIROS+, tiene una carga útil de hasta 250 kg. Además, dispone de otras versiones con brazos colaborativos de 3 Kg., 5 Kg. y 16 Kg. de carga útil.
¿Cómo se establecen los turnos de trabajo?
Uno de los grandes beneficios de los manipuladores móviles de Robotnik es que, con la flota de robots adecuada -optimizada en número de unidades- se pueden trabajar turnos completos de 24 horas. Los robots realizarán cargas automáticas de la batería cuando sea necesario. El robot está equipado con una estación de carga a la que se puede conectar de forma autónoma. Es posible ordenar al robot que realice una acción de carga, que lance un terminal, que lance de forma inalámbrica, que lance un protocolo industrial como descanso o también que lance la interfaz poliscope de Universal Robots.


Alimentación de maquinas

La manipulación móvil colaborativa es ya una realidad al alcance de todas las empresas que compiten en el marco de la industria 4.0.
Se trata de manipuladores móviles autónomos preparados para trabajar con seguridad en entornos donde hay personas.
Su capacidad para realizar tareas mecánicas y repetitivas, cubriendo turnos de trabajo completos, los convierten en herramientas fundamentales para cualquier industria que desee posicionarse a la vanguardia tecnológica y ocupar un puesto de relevancia en el mercado actual.