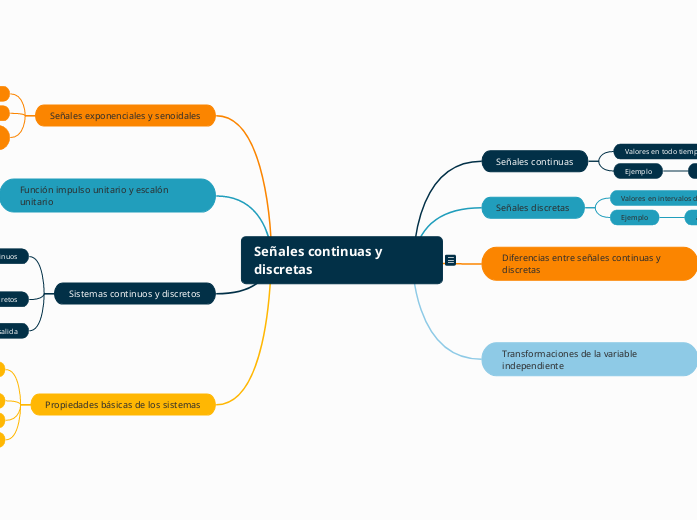
Señales continuas y discretas
Señales continuas
Valores en todo tiempo continuo (𝑡)
Ejemplo
corriente eléctrica
Señales discretas
Valores en intervalos de tiempo (𝑛)
Ejemplo
audio digital
Diferencias entre señales continuas y discretas
Representación en el tiempo
Almacenamiento
Procesamiento
Transformaciones de la variable independiente
Desplazamiento en el tiempo
Adelanto (𝑥(𝑡−𝑡0))
Retraso (𝑥(𝑡+𝑡0))
Escalado en el tiempo
Expansión (𝑥(𝑎𝑡))
Compresión (𝑥(𝑡/𝑎))
Reflejo
Inversión en el tiempo (𝑥(−𝑡))
Señales exponenciales y senoidales
Exponenciales (𝑥(𝑡)=𝐴𝑒𝜎𝑡)
Usadas en análisis de sistemas
Senoidales (𝑥(𝑡)=𝐴sin(𝜔𝑡+𝜙))
Base para señales periódicas
Representación en el dominio del tiempo y frecuencia
Función impulso unitario y escalón unitario
Impulso unitario (𝛿(𝑡))
Modelo ideal para representar eventos instantáneos
Escalón unitario (𝑢(𝑡))
Representa cambios bruscos
Relación
Derivada del escalón = impulso unitario
Sistemas continuos y discretos
Continuos
Modelados por ecuaciones diferenciales
Tiempo continuo
Discretos
Modelados por ecuaciones en diferencias
Tiempo discreto
Relación entrada-salida
Respuesta impulsiva y convolución
Propiedades básicas de los sistemas
Linealidad
Superposición
Escalabilidad
Estabilidad
Respuesta acotada para entradas acotadas
Causalidad
Respuesta depende del presente o pasado
no del futuro
Invariancia en el tiempo
No cambia con desplazamientos en el tiempo