
zz
ACTUADORES EN ROBOTS MÓVILES.
Neumáticos
Hidráulicos
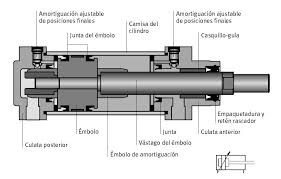
La energía acumulada en el aire comprimido en trabajo mecánico de movimiento circular o movimiento rectilíneo. Los actuadores neumáticos se calcifican en dos grandes grupos: cilindros neumáticos y motores neumáticos.
Electricos
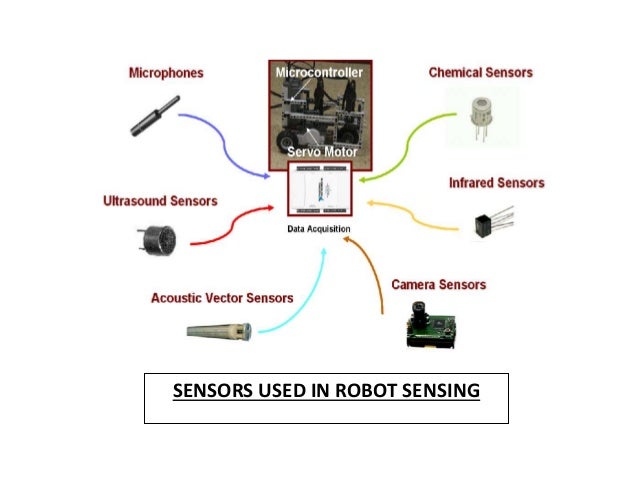
Sensores
Para conseguir que el robot realice su tarea con la adecuada
precisión es preciso que tenga conocimiento tanto de su propio
estado como del estado de su entorno.
SISTEMAS SENSORIALES EN ROBOTS MÓVILES
Sensores de Velocidad
Sensores de Desplazamiento
Sensores de Fuerza
Sensores de Aceleración
Sensores de Luz
Sensores Neumáticos
Sensores Táctiles
Sensores ópticos
Los detectores ópticos basan su funcionamiento en la emisión de un haz de
luz que es interrumpido o reflejado por el objeto a detectar. Tiene mucha
aplicaciones en al ámbito industrial y son ampliamente utilizados. Fuente.- Origina un haz luminoso, usualmente con un LED, que puede tener un
amplio rango en el espectro (incluyendo luz visible e infrarroja). Para la mayoría
de las aplicaciones se prefiere las radiaciones infrarrojas pues son las que mayor
porcentaje de luz emiten y disipan menos calor. Los LEDs tipos visibles son muy
útiles sobre todo para facilitar el ajuste de la operación del sensor. Entre los LED
de luz visible los LEDs de luz roja son los más eficaces para esta aplicación.
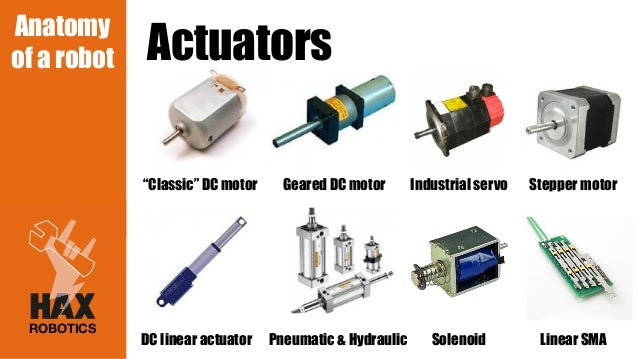
Actuadores
Los actuadores tienen como misión generar el movimiento de los elementos del robot
según las ordenes dadas por la unidad de control. Los actuadores utilizados en robótica
pueden emplear energía neumática, hidráulica o eléctrica. Cada uno de estos sistemas
presenta características diferentes, siendo preciso evaluarlas a la hora de seleccionar el
tipo de actuador más conveniente
Motores de C. Continua
Motores de C. Alterna
Motores Brushless

- También conocidos como motores DC trabajan o se alimentan de corriente continua como la que suministran las pilas o las baterías.
- Se utilizan frecuentemente los motores de corriente continua por la facilidad de controlarlos y su fácil interconexión.
Obtienen su energía de un fluido a presión, generalmente algún tipo de aceite mineral. Los actuadores hidráulicos se clasifican en tres grandes grupos: cilindros hidráulicos, motores hidráulicos y válvulas hidráulicas.La principal ventaja de estos actuadores es su relación potencia/peso.
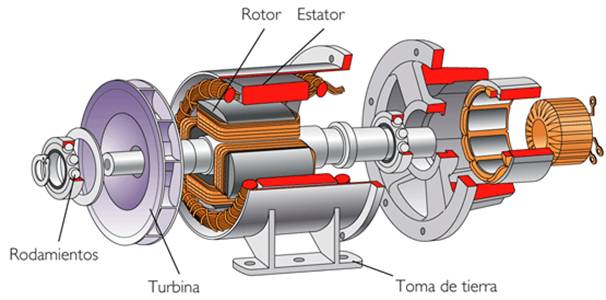
Los llamados "motores DC sin escobillas" ("Brushless DC Motors"
o BLDC) son máquinas eléctricas con imán permanente en el rotor
y bobinas en el estator (tres o mas fases), alimentadas con un
conjunto de tensiones polifásicas alternas (sinusoidales o
trapezoidales), generadas por medio de un circuito inversor
controlado de forma que las características de operación de la
máquina eléctrica emulen las de un motor DC convencional
("motor DC con escobillas") en lo referente a las relaciones
par/corriente y velocidad angular/ voltaje.
Digitales
Analógicos
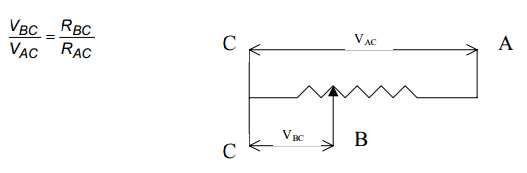
Potenciómetros.- Se usan para la determinación de desplazamiento lineales o angulares, eléctricamente se cumple una relación.

ENCODERS: (codificadores angulares de posición).- Constan de un disco transparente con una serie de marcas opacas colocadas radialmente y equidistantes entre sí, de un sistema de iluminación y de un elemento fotorreceptor. El eje cuya posición se quiere medir va acoplado al disco, a medida que el eje gira se van generando pulsos en el receptor cada vez que la luz atraviese las marcas, llevando una cuenta de estos pulsos es posible conocer la posición del eje. La resolución depende del número de marcas que se pueden poner físicamente en el disco.
Se utilizan en la mayor parte de máquinas industriales.
Están constituidas por el estator, el rotor y el entrehierro.
- Síncronos: son aquellas en las que la velocidad de giro del rotor es la misma que la
velocidad de giro del campo magnético. Son poco utilizadas, empleándose solo en
aplicaciones muy especificas.
- Asíncronos o de inducción: en las que la velocidad de giro del rotor es inferior a la de
rotación de campo magnético. La amplia mayoría de los motores empleados son asíncronos
trifásicos debido a su sencillez, rendimiento y robustez, además pueden ser empleados en
instalaciones monofásicas mediante la conexión de un condensador.Están constituidas por el estator, el rotor y el entrehierro.
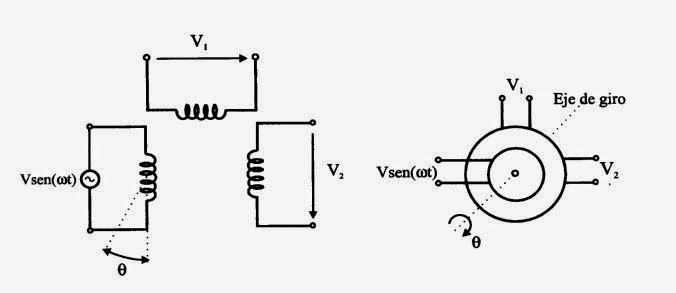
RESOLVERS: (captadores angulares de posición).- Constan de una bobina solidaria al eje excitada por una portadora, y dos bobinas fijas situadas a su alrededor. La bobina móvil excitada con tensión Vsen(ωt) y girada un ángul θ induce en las bobinas fijas las tensiones:
V1 = V sen(ωt) senθ
V2 = V sen(ωt) cosθ
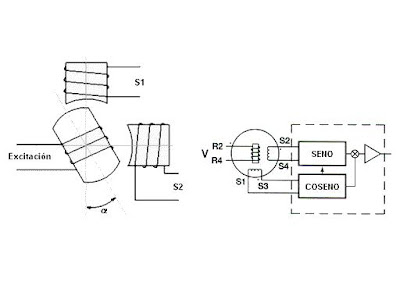
SINCROS.- la bobina que hace función de primario o rotor se
encuentra solidaria al eje de giro. El secundario está formado
por tres bobinas fijas colocadas alrededor del primario en
forma de estrella y desfasadas entre si 120º (estator). Al rotor
se le aplica una señal senoidal y se genera en cada una de las
bobinas fijas un voltaje inducido con un desfase entre ellos de
120º:
V13 = 31/2 V cos(ωt) senθ
V32 = 31/2 V cos(ωt) sen(θ+120)
V21 = 31/2 V cos(ωt) sen(θ+240)
Para los sistemas de control hay que pasar la señal analógica a
digital, para lo cual se utilizan convertidores resolver / digital
(R/D).

SENSORES LINEALES DE POSICIÓN (LVDT)
LVDT.- transformador diferencial de variación lineal, que consta
de un núcleo de material ferromagnético unido al eje, que se
mueve linealmente entre un devanado primario y dos
secundarios haciendo que varíe la inductancia entre ellos.
En el caso de la figura, se puede afirmar que la energía de la
corriente en la bobina primaria es igual a la que circula en las
secundarias: EP iP t = ES iS t => EP / ES = iS / iP
Como resultado de un desplazamiento que se quiere medir, el
núcleo magnético es desplazado de manera que una de las
bobinas secundarias no recubra totalmente el núcleo => la
corriente inducida en un secundario será mayor que la
inducida en el otro. De la diferencia de las tensiones medidas
en los dos secundarios se obtiene el desplazamiento realizado
por el núcleo.

Una posibilidad es derivar la posición.
Tacogenerador.- proporciona una tensión proporcional a la
velocidad de giro del eje.
Utiliza un interruptor llamado “reed switch”, que utiliza fuerzas
magnéticas para activarse o no dependiendo si un objeto
magnético se encuentra físicamente cercano al interruptor.
Encóders.- si se dispone de un detector que se active cuando se
ha realizado un giro completo, se calcula la velocidad: el número
de vueltas por unidad de tiempo.
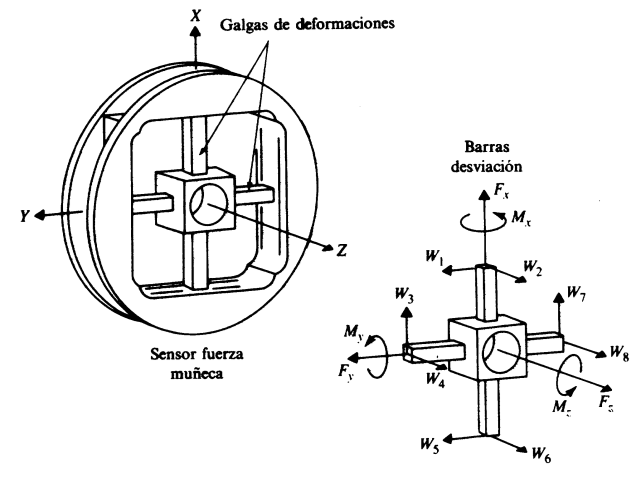
Sensor de muñeca.- se colocan entre la extremidad del brazo robot y el efecto
extremo, estan constituidas por galgas de deformación que
miden las pequeñas deformaciones causadas en la sujección
de la muñeca por efecto de fuerzas exteriores

Sensores piezoeléctricos.- formados por materiales cerámicos o cristales iónicos que
generan una pequeña cantidad de energía eléctrica cuando
son deformados.
Cuando sobre materiales piezoléctricos (titanio de bario) se
aplica una fuerza, las cargas negativas del material se
concentran en un lado mientras que el opuesto queda
caragado positivamente, porduciendose un voltaje (y también
un cambio en su capacitancia).
