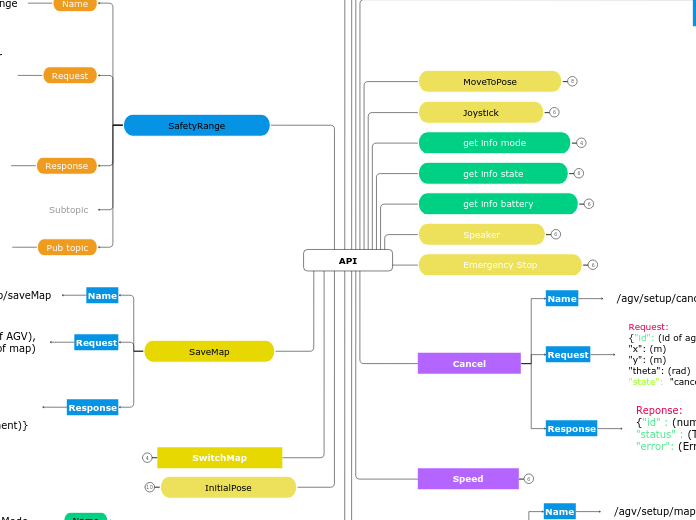
API
get CurrentPose
SavePose
Yellow: Processed
Purple: Not Done
Green: Done but not test
Blue: Huy need repair
MoveToPose
Joystick
SwitchMode
SafetyRange
Name
/agv/setup/safetyRange
Request
Request:
{"id" : (number of AGV),
"range" : (Range of safety )-( 0 or 1 or 2 ),
"enable": (True or Fale),
"points": [[x1, y1],[x2, y2], [x3, y3], ...] (m)
}
Response
Reponse:
{"id" : (number of AGV),
"status" : (True or False),
"error": (Error when implement)}
Subtopic
Pub topic
Name Topic: api/range
Message: LaserSafety
SaveMap
Name
/agv/setup/saveMap
Request
Request:
{"id" : (number of AGV),
"name" : (Name of map)
}
Response
Reponse:
{"id" : (number of AGV),
"status" : (True or False),
"error": (Error when implement)}
SwitchMap
InitialPose
get info mode
get info state
get info battery
Speaker
Emergency Stop
Cancel
Name
/agv/setup/cancelMission
Request
Request:
{"id": (id of agv),
"x": (m)
"y": (m)
"theta": (rad)
"state": "cancel", "pause"}
Response
Reponse:
{"id" : (number of AGV),
"status" : (True or False),
"error": (Error when implement)}
Speed
SwitchMode
Name
/agv/setup/switchMode
Request
Request:
{"id" : (number of AGV),
"mode": (1: Starting;
2: Navigation
3: Mapping
4: Manual)
}
Response
Reponse:
{"id" : (number of AGV),
"status" : (True or false),
"mode": (Mode of current agv),
"error": (Error when implement)}
Speed
Name
/agv/setup/mapData
Request
Request:
{"id": (id of agv),
"data": (mapData)
}
Response
Reponse:
{"id" : (number of AGV),
"status" : (True or False),
"error": (Error when implement)}