El principio de la robótica eran autónomas, este se define como una maquina que imita una figura de movimientos de un ser animado.
1739, Duck, Jacques Vaucanson, Imitaba un proceso de digestión
1801, Telar, J.Jaquard, Maquina programable para la urdimbre
1954, Unimate, George Devol, Primer Robot programable
1956, Unimation, GM, Primer robot industrial, mueve objetos de un lado a otro
1966, Eliza, Lab. de IA MIT por Joseph Weizenbaum, Primer programa de inteligencia artificial
1972, Puma, Vicotr Scheinman, Brazo Robot Industrial
1977, Voyager 1 y Voyager 2, NASA/JPL, Sonda espacial robotica, localiza y estudia los limites del sistema solar, sigue operando en la actualidad
1989, Genghis, Primer robot de la compañía ¡Robot, Primer robot andante, rastrea personas en terrenos difíciles
1999, AIBO, Sony, Perro mascota robótico
2000, Asimo, Honda, Robot humanoide
2008, Nao, Aldebarán Robotics, Plataforma estándar para robocup, futbolistas y para fines educativos y de investigación
Programa: Es un conjunto de instrucciones basadas en el lenguaje de programación que una computadora interpreta para realizar una función especifica.
Lenguaje de programación: Es el conjunto de simbolos, vocablos y reglas de sintaxis que controlan el comportamiento físico y logico de una computadora
Ejemplo de lenguajes de programación
C++
Rogic
Java
Python
Swift
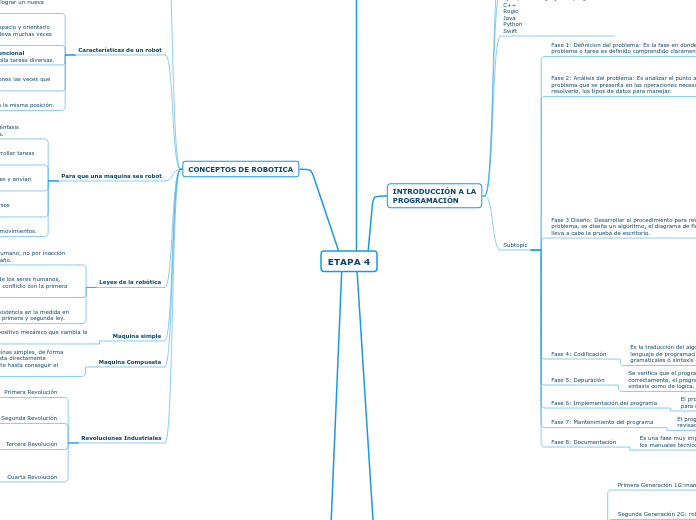
Subtopic
Fase 1: Definicion del problema: Es la fase en donde el problema o tarea es definido comprendido claramente.
Fase 2: Análisis del problema: Es analizar el punto a punto el problema que se presenta en las operaciones necesarias para resolverlo, los tipos de datos para manejar.
Entrada: Datos que hay que ingresar para la resolución del problema.
Proceso: Procedimientos donde se utilizan los datos de entrada para resolver el problema.
Salida: La solución del problema
Fase 3 Diseño: Desarrollar el procedimiento para resolver el problema, se diseña un algoritmo, el diagrama de flujo y se lleva a cabo la prueba de escritorio.
Diagrama de flujo: Es la representación grafica de un algoritmo, es una de las herramientas de programación que permite visualizar de manera general el desarrollo de la solución del problema.
Algoritmo: Conjunto de pasos ordenados de forma lógica para llevar a cabo una tarea determinada o que describen la solución de un problema
Tipos de algoritmos: Los procedimeintos para resolver un problema pueden ser lineales, mediante toma de decisiones o repetitivos
Algoritmos secuenciales: Son llamados así porque los pasos se ejecutan o describen de principio a fin sin salto ni brincos.
Algoritmos condicionales: Implican la toma de decisiones en algunas de los pasos debidos a condiciones o preguntas que llevan a responder verdaderos o falso, o seguir por un camino u otro.
Algoritmos cíclicos: Son aquellos donde existen acciones o pasos que se repiten mientras o hasta que una condición se cumpla.
Características de los algoritmos: todos los algoritmos, sin importar su tipo, cuentan con los siguientes elementos que son parte primordial.
Tener principio y fin
Contar con una cantidad finita de pasos
Los pasos deben ser ordenados lógicamente
Los pasos deben buscar solución el problema de manera lógica.
Pruebas de escritorio: Consiste en dar valor s las variables en el diagrama de flujo y comprobar si el resultado obtenidos es el esperado.
Fase 4: Codificación
Es la traducción del algoritmo o diagrama de flujo a un lenguaje de programación de acuerdo con las reglas gramaticales o sintaxis del mismo.
Fase 5: Depuración
Se verifica que el programa haya sido codificado correctamente, el programa se deja libre de errores tanto de sintaxis como de lógica.
Fase 6: Implementación del programa
El programa diseñado y desarrollado es instalado en el sistema para cumplir con la tarea encomendada.
Fase 7: Mantenimiento del programa
El programa implementado en el área de trabajo tiene que ser revisado periódicamente.
Fase 8: Documentación
Es una fase muy importante, ya que en ella se generan tanto los manuales técnicos, como el manual de usuario y ayuda
Segun su cronología
Primera Generación 1G:manipulaodres
Poseen sistemas mecánico, cuenta con un sistema
de control, no tienen retroalimentación de sensores
y realizan tareas programadas (años 50)
Segunda Generación 2G: robots de aprendizaje
Sistema de control, por medio de sensores
adquieren información de su entorno, analiza datos,
repite secuencias de movimientos por humano memoriza
y replica movimientos (años 80)
Tercera Generación 3G: robots con control de aprendizaje
Robots con controladores (CPU), usan datos que
obtiene de sus sensores, ejecutan datos dadas de su lenguaje
de programación son reprogramables. (años 80 y 90)
Cuarta Generación 4G: robots inteligentes
Sensores sofisticados, se adaptan y aprenden de su entorno
utilizando rede neuronales, obtienen y analizan datos, toman decisiones y el control del proceso en tiempo real.
Quinta Generación (5G)
Depende de una generación de jóvenes interesados en
la robótica, se espera que incluya tecnologías en desarrollo
como la nanotecnología.
Según su arquitectura
Poli articulados
Robots que tienen articulaciones
llamadas grados de libertad accionadas
por distintos medios como motores o
sistemas neumáticos.
Moviles
Sistema locomotor tipo rodante, capacidad de
desplazarse a traves de telemando, mediante pistas
materializadas con círculos empotrados en el suelo con
bandas detectadas fotoeléctricamente.
Androides
Robots que intentan producir la forma y comportamiento
humano de manera autonoma, se centra en la locomoción
bípeda. Controla los procesos y mantener el equilibrio.
Cyborg
Unión cibernética, son seres formados por materia viva
y dispositivos electrónicos, esta en constante cambio, se refiere a los seres humanos y mejora las capacidades o suplir alguna deficiencia.
Zoomórfico
Robots que imitan ser vivos pueden ser caminadores,
se usan para investigación y experimentación para el desarrollo de vehículos pilotados y autónomos.
Hibrido
Son organismos cibernéticos controlados por computadora
es un ser semivivo, contiene elementos biológicos y electrónicos.
TECNOLOGÍA
Tecnología
Es el conjunto de conocimientos y técnicas que permiten al ser humano modificar su entorno material o virtual para satisfacer las necesidades, responde al deseo y voluntad de transformar el entorno.
Ciencia y Tecnología
La ciencia y la tecnología están logadas, ya que no es posible crear tecnología sin el uso de conocimientos científicos, como tampoco, como tampoco es posible avanzar en el conocimiento científico sin la ayuda de la tecnología.
Robótica
La robótica estudia el diseño, la construcción, la programación y aplicación de maquinas capaces de desempeñar tareas diversas.
Robot
Un robot es una maquina controlada por una computadora y programada para moverse se manipulan objetos y realiza tareas interactuando con su entorno.
Características de un robot
Reprogramable
Permite cambiar un proceso o función para lograr un nueva secuencia de movimiento o procesos.
Manipulador
Permite mover uno o varios objetos en el espacio y orientarlo en la posición que debe ser colocado, esto lleva muchas veces a la comparación con manos y brazo.
Multifuncional
Desarrolla tareas diversas.
Repetitivo
Tiene la capacidad de llevar a cabo las acciones las veces que sean programadas.
Exacto
Realiza acciones con la misma posición.
Para que una maquina sea robot
Hardware
Se refiere a la estructura física, se diseña con un énfasis basado en el ambiente, en el usuario y en la tarea.
Software
Instrucciones en el sistema de control, para desarrollar tareas especificas.
Sensores
Detectan cambios en el entorno, miden magnitudes y envían información.
Movimiento
Debe tener acción o movimiento a través de diversos actuadores.
Fuente de energía
Para convertirla en trabajo al efectuar movimientos.
Leyes de la robótica
Primera Ley
Un robot no puede dañar a un ser humano, no por inacción permitir que un ser humano sufra daño.
Segunda Ley
Un robot debe cumplir las ordenes de los seres humanos, excepto si dichas ordenes entran en conflicto con la primera ley.
Tercera Ley
Un robot debe proteger su propia existencia en la medida en que ello no entre en conflicto con la primera y segunda ley.
Maquina simple
Una maquina simple es un dispositivo mecánico que cambia la dirección o la magnitud.
Maquina Compuesta
Es la combinación de diversas maquinas simples, de forma que la salida de cada una de ellas esta directamente conectada a la entrada de la siguiente hasta conseguir el efecto deseado.
Revoluciones Industriales
Primera Revolución
La evolución de las maquinas fue en 1780, cuando Walt logró crear una maquina de vapor para uso industrial, con lo cual se dio origen a la Primera Revolución Industrial.
Segunda Revolución
Se hizo posible gracias a nuevas fuentes de energía como el gas, el petróleo o la electricidad; con el sistema de generación polifásico de Tesla, en 1887.
Tercera Revolución
También llamada Revolución de la Inteligencia, la conjunción de las energías renovables e Internet propicio esta transformación científico-tecnología.
Cuarta Revolución
Protagonizada por los robots integrados en sistemas ciberfísicos, la combinación de nanotecnologías, neuortecnologías, robots, inteligencia artificial, biotecnología, sistemas de almacenamiento de energía, drones e impresoras 3D.
Robots industriales
Es un manipulador multifuncional reprogramable
capaz de mover, piezas, herramientas o dispositivos especiales
según trayectorias variables programadas para realizar tareas diversas
Robots de servicios
Robot que opera semi o totalmente autónomo para realizar
servicios útiles para el bienestar de los seres humanos y equipos, con exclusión de las operaciones de fabricación
Robots de investigación
Robots que proporcionan resultados rápidos y exactos
en términos de modernos procesos de automatización
cuando el tiempo es un factor crucial en la investigación
Robots médicos
Brazos robóticos que asisten al cirujano en las intervenciones
se pueden destacar dos cosas, la tele cirugía y la cirugía mínimamente invasiva; como ventajas podemos destacar la precisión, y la miniaturización.
Robots de exploración
Son robots dedicados a la inspección, exploración y rescate en
entornos que el ser humano no puede alcanzar o a la cuales no tiene fácil acceso, ya sean terrestres, acuáticos, aéreos o del espacio exterior.
Futuro de la robótica
El futuro de la robotica apunta hacia un cambio total en la forma en que estudiamos, trabajamos y nos relacionamos; se dice que estudiaremos carreras que aún no existen y tendremos puestos de trabajos que todavía no se han creado