CINEMÁTICA
3.Tipos de movimientos.
3.1.Movimientos rectilíneos
El movimiento rectilíneo y uniforme es el que lleva un cuerpo que se mueve con vector velocidad constante,en módulo,dirección y sentido.La trayectoria correspondiente es una línea recta.
La ecuación del MRU es una función dependiente del tiempo:
r→(t)=r0→+v→·t
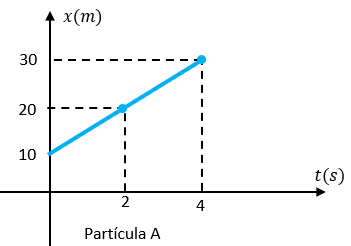
Representación gráfica del MRU
Un movimiento uniformemente acelerado,MUA,es aquel en que un móvil se desplaza con aceleración constante:a→=constante
Ecuación vectorial de la velocidad para un MUA es:
v→(t)=v0→+a→·t
Ecuación escalar de la velocidad para un MUA:
v(t)=v0+ a·t
Ecuación vectorial de la posición en el MUA es :
r→(t)=r0→+v0→·t+(a→·t2)/2
Ecuación escalar de la posición en el MRUA es :
x(t)=x0+v0·t+(a·t2)/2
Ecuación escalar si no se conoce el tiempo para el MRUA:
v2-v02=2·a·Ax

Representación gráfica del MRUA
Ecuación vectorial de aceleración:
a→(t)=-g j→=-9,8 m/s2
Ecuación escalar de aceleración:
a(t)=-g=-9,8m/s2
Caída libre desde el reposo:
y(t)=h-(g·t2)/2 ; v(t)=-g·t
Lanzamiento vertical:
y(t)=h+/- v0·t-(g·t2)/2 ; v(t)=+/- v0-g·t
3.2.Movimientos circulares
Un movimiento circular es aquel cuya trayectoria es una circunferencia.
Posición angular:θ
Velocidad angular: ω
Aceleración angular: α
La posición angular:la relación entre el espacio recorrido s sobre la circunstancia y el ángulo girado θ viene dada por:
arco=radio · ángulo
s= R · θ
La velocidad angular es la derivada de la posición angular con respecto al tiempo:
ω =lím Aθ/At=dθ/dt
At→0
En el SI se mide en radianes por segundo,rad/s.
La relación entre el módulo de la velocidad lineal y la velocidad angular ω viene dada por:
v=ω·R
La aceleración angular α es la derivada de la velocidad angular con respecto al tiempo:
α=lím Aω/At=dω/dt
At→0
La relación entre la aceleración tangencial,aT,y la angular,α,es:
aT=α·R
El movimiento circular uniforme,MCU,es el que lleva un móvil que describe una trayectoria circular con velocidad angular constante.
La ecuación de la posición en el MCU es:
θ(t)=θ0+ω·t
El periodo, T, es el tiempo que tarda el móvil en recorrer una vuelta completa,es decir:
Aθ = 2 π rad, cuando At=T
El periodo se mide en segundos, s.
La frecuencia, f, es la inversa del periodo, T. Determina el número de vueltas por segundo.
La frecuencia se mide en hercios, Hz.
La relación entre la velocidad angular y la frecuencia es:
ω= 2π •f
El movimiento circular uniformemente acelerado, MCUA,
es aquel que recorre un móvil cuya trayectoria es una circunferencia y tiene aceleración angular constante.
. Si α= cte. = aT = α•R = cte.
• Como ω no es cte. aN =ω2•R no es cte.
La ecuación que relaciona la velocidad angular con el tiempo
en el MCUA es:
ω(t) = ω0 + α·t
Ecuación de la posición angular en el MCUA:
θ(t)=θ0+ ω0·t +( α·t2)/2
Ecuación de la velocidad angular en el MCUA:
ω(t)=ω0+ α·t
3.3.Composición de movimientos rectilíneos
Los movimientos parabólicos se pueden descomponer en dos:
MRU:en la dirección horizontal(eje X)de ecuaciónes:
x=x0+v0x·t
vx=vox(cte)
MRUA:en la dirección vertical(eje Y)de ecuaciones:
y=y0+v0y·t-(g·t2)/2
vy=v0y-g·t
Tiempo de vuelo:
tvuelo=(2·v0·sen α)/g
Alcance máximo:
xmáx=(v02·sen 2α)/g
Altura máxima:
ymáx=(v02·sen2 α)/2·g
Ecuación de trayectoria:
y=tg α ·x- (g·x2)/2·v02·cos2 α

Representación gráfica de tiro parabólico
1.Introducción. Vector de posición. Sistemas de referencia
La cinemática es la parte de la física que se encarga del estudio de los movimientos sin tener en cuenta las causas que lo producen.
Se define como punto material un objeto sin tamaño alguno,pero con masa.También lo llamaremos móvil.
La trayectoria es el conjunto de puntos por los que pasa el móvil.
Un sistema de referencia proporciona una forma de situar a un punto respecto a otro que hayamos establecido previamente y que sirve de referencia.
El vector de posición en el instante t,r →(t),se representa mediante una flecha que va desde el origen de coordenadas O hasta la posición del móvil,P.
El vector de posición,r→(t),determina la posición en función del tiempo.
2.Magnitudes relacionadas con el movimiento.
2.1.Desplazamiento. Espacio recorrido
Definimos el vector desplazamiento entre dos puntos P1 y P2 cuyos vectores de posición son r1→ y r2→ como la diferencia entre estos dos vectores,así:
Ar=r2→-r1→
La trayectoria es el camino que describe el cuerpo que se mueve.Es el conjunto de puntos por los que pasa un móvil en su movimiento.
La distancia sobre la trayectoria medida en unidades de longitud es el espacio recorrido,s.
Se llama desplazamiento,Ar,de un móvil a un vector que tiene su origen en el punto inicial del movimiento y su extremo en el punto final.
2.2.Velocidad
Se llama velocidad,v→,de un móvil al desplazamiento que experimenta por unidad de tiempo.
La velocidad media en un intervalo de tiempo:
v→=desplazamiento/tiempo empleado=rf→-r0→/tf-t0=Ar→/At
La velocidad media para un recorrido (sin cambio de sentido) entre los puntos P1 y P2 que se inicia en t1 y finaliza en t2 es:
vm=As/At=s2-s1/t2-t1
El vector velocidad media para un recorrido entre los puntos P1 y P2 que se inicia en el tiempo t1 y finaliza en t2 es:
→ → → →
vm=Ar/At=r2-r1/t2-t1
La velocidad instantánea:
v=lím As/At
At→0
Y el vector velocidad instantánea para un recorrido entre los puntos P1 y P2 muy próximos entre sí:
v→=lím Ar→/At
At→0
El movimiento es relativo,depende del sistema de referencia que se use para su observación.
Vrel→=Vobj→-Vsis→
2.3.Aceleración. Componentes intrínsecas
La aceleración,a→,es una magnitud que mide lo que varía la velocidad de un móvil por unidad de tiempo.La aceleración media en un intervalo media en un intervalo de tiempo es:
a→=Vf→-V0→/tf-t0=Av→/At
En el SI,el módulo de la aceleración media se mide en m/s2
Aceleración instantánea:
a→=lím Av→/At=dv→/dt
At→0
Aceleración tangencial indica cómo cambia el módulo de la velocidad con el tiempo.
aT→=lím (Av/At) uT→
At→0
La aceleración normal tiene la dirección del radio del radio de curvatura y el sentido hacia el centro de la curva.
aN→=V2→-V1→/t
Módulo de la aceleración normal:
aN=V^2/R


La relación entre estas tres aceleraciones es:
arel→=aobj→-asis→

Clasificación de los movimientos según su aceleración