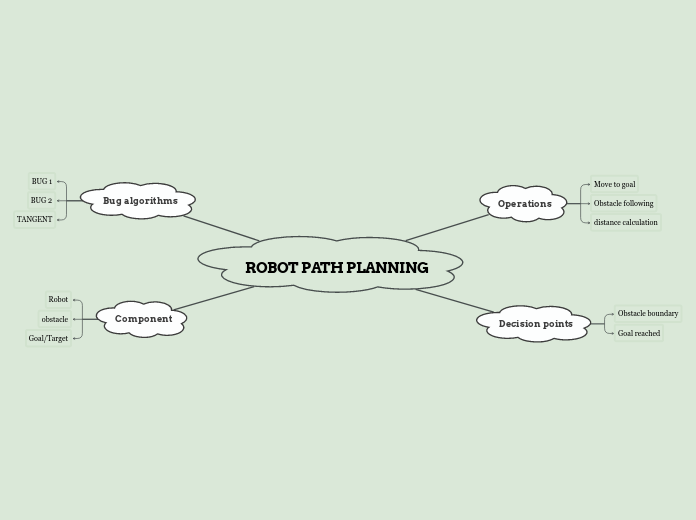
ROBOT PATH PLANNING
Operations
Move to goal
Obstacle following
distance calculation
Decision points
Obstacle boundary
Goal reached
Bug algorithms
BUG 1
BUG 2
TANGENT
Component
Robot
obstacle
Goal/Target
Move to goal
Obstacle following
distance calculation
Obstacle boundary
Goal reached
BUG 1
BUG 2
TANGENT
Robot
obstacle
Goal/Target